|
|
|
| ADAS and Autopilot System Testing |
—— System Test Features
Compared with the traditional vehicle electronic control system, ADAS and automatic driving system have the following characteristics:
• The application scene of ADAS and autopilot system is a closed loop system composed of driver, vehicle and environment;
• ADAS and autopilot system are directly related to vehicle's own performance, traffic environment characteristics and driver's safety behavior;
• ADAS and automatic driving system need to cooperate with other vehicle control systems;
• ADAS and automatic driving system require multi-sensor data acquisition and processing, and data fusion can realize environmental perception.
Because of the above characteristics, the test of ADAS and autopilot system is different from the conventional vehicle control system testing technology:
• The driver is an important part of ADAS and automatic driving system. The subjective feeling of the driver is greatly influenced by the surrounding traffic environment. The conventional test method can not provide the subjective feeling of the real traffic environment to the driver;
• The real vehicle road test is complex and directly related to the safety of the system. The risk coefficient of real road test is large, but the controllability of real road traffic environment is low, which has great uncertainty and non repeatability;
• The functions of ADAS and automatic driving system are complex. The actual road test requires a lot of scenes, huge workload, huge amount of manpower and material resources, and rich experience in implementation.
—— System Test Technology
Virtual driving test:
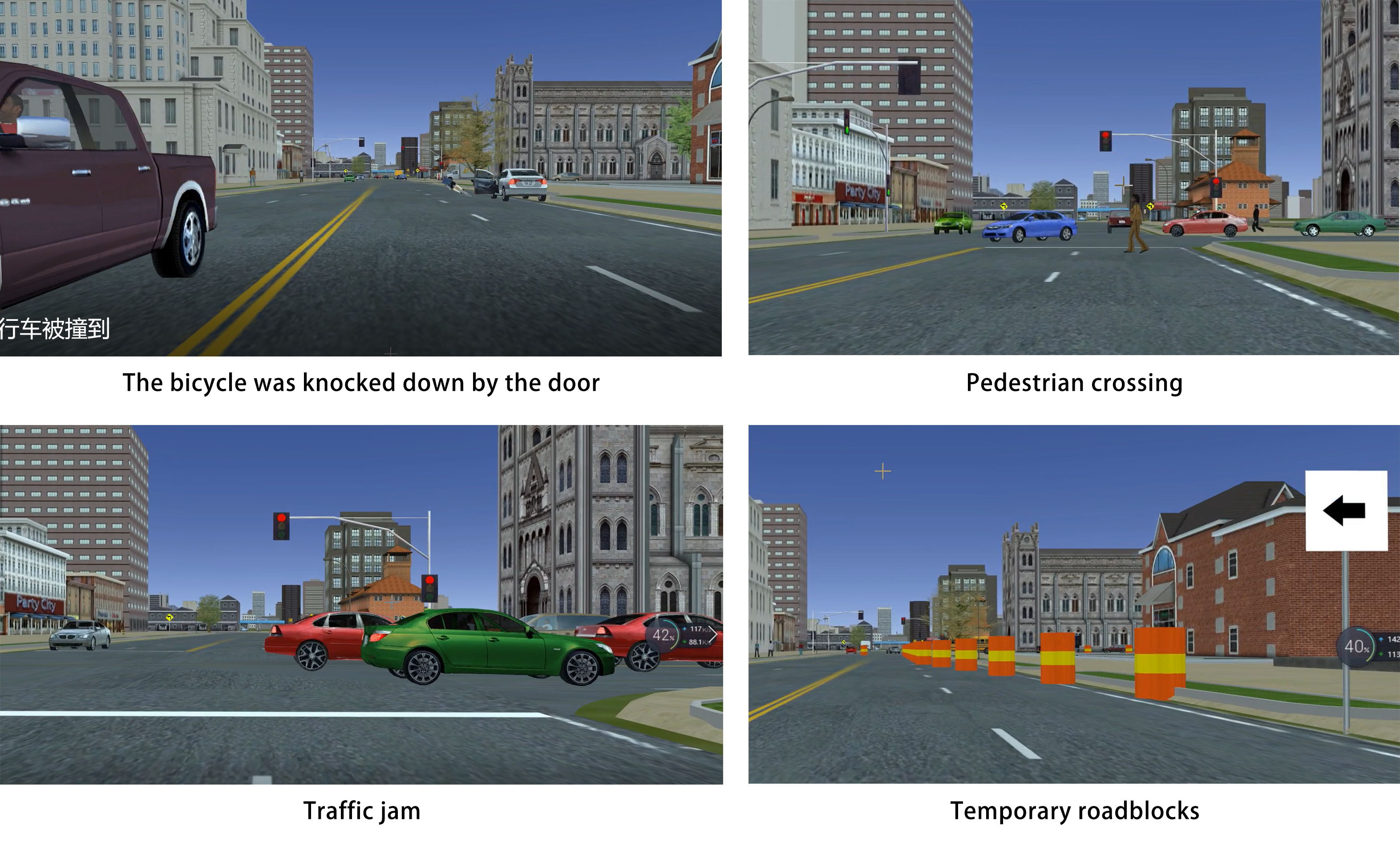
• Test based on virtual driving scene and working condition;
• Three dimensional virtual traffic environment and intelligent vehicle model are established, and real-time simulation technology is used to test ADAS function;
• Through the establishment of the model, the virtual test of driver in the loop test is realized, and the collision avoidance and driving behavior characteristics of the driver are analyzed;
• It can realize the combination of in loop test platform and driver simulator for driver test and subjective evaluation;
• Build traffic test scenarios that meet Euro NCAP and ISO standards.
Field test:
• Based on the functions of ADAS and autopilot system, the test plan is formulated;
• Target vehicle integration and modification based on ADAS and autopilot system;
• Test the complete function of the scene coverage system;
• The test scenes cover different roads, different weather and different lighting conditions in different regions;
• The data information of driver operation, traffic scene and bus message are collected in the whole process.
 China road scene
China road scene
 Night lighting effect
Night lighting effect
 Video and data acquisition
Video and data acquisition
Rich sensor models:
• Camera, fisheye, mono, stereo camera, fish eye, monocular and binocular camera
• Millimeter wave radar
• Laser and lidar
• Ultrasonic
• V2X sensors
The parameters of sensors, such as number, type and location, can be customized by users. Camera parameters include three-dimensional position, three-dimensional direction relative to vehicle coordinate system, field of view and visual depth. Through the output of sensor model data, the control algorithm can divide the environmental information into 12 semantic categories: Road, lane markings, traffic signs, sidewalks, fences, posts, walls, buildings, vegetation, vehicles, pedestrians and others.
At the same time, the simulation software can provide vehicle related measurements, including vehicle position and direction relative to the world coordinate system (similar to GPS information), velocity, acceleration vector and cumulative impact.

Camera sensor image
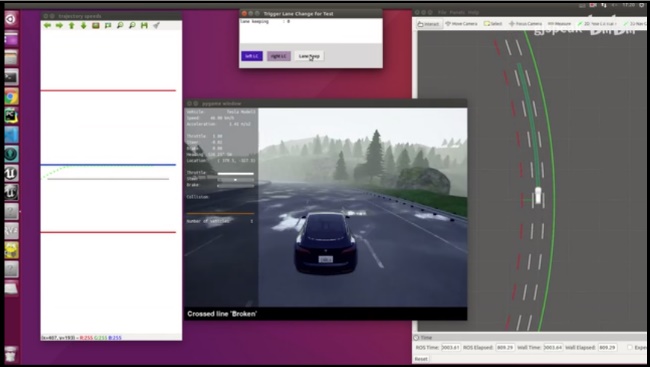  Path planning algorithm testing
Path planning algorithm testing
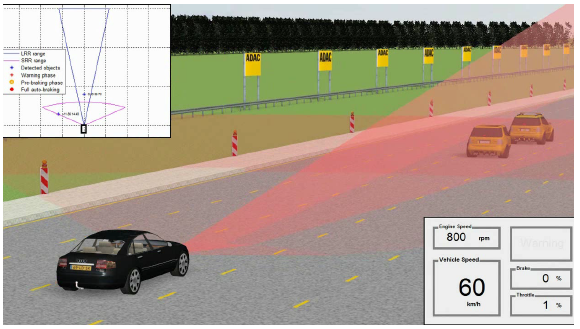
AEBS system equipped with radar |
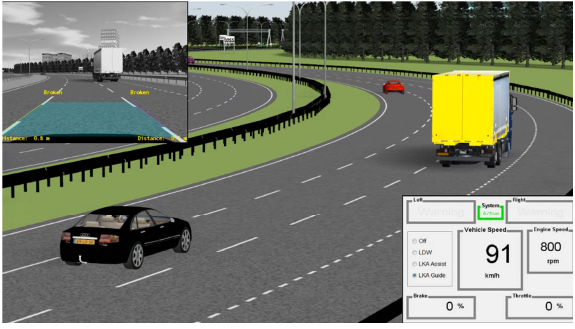
LKA system with camera |
|