|
|
|
| Full Automatic Code Generation Software ECUCoder |
—— Full Automatic Code Generation Software ECUCoder
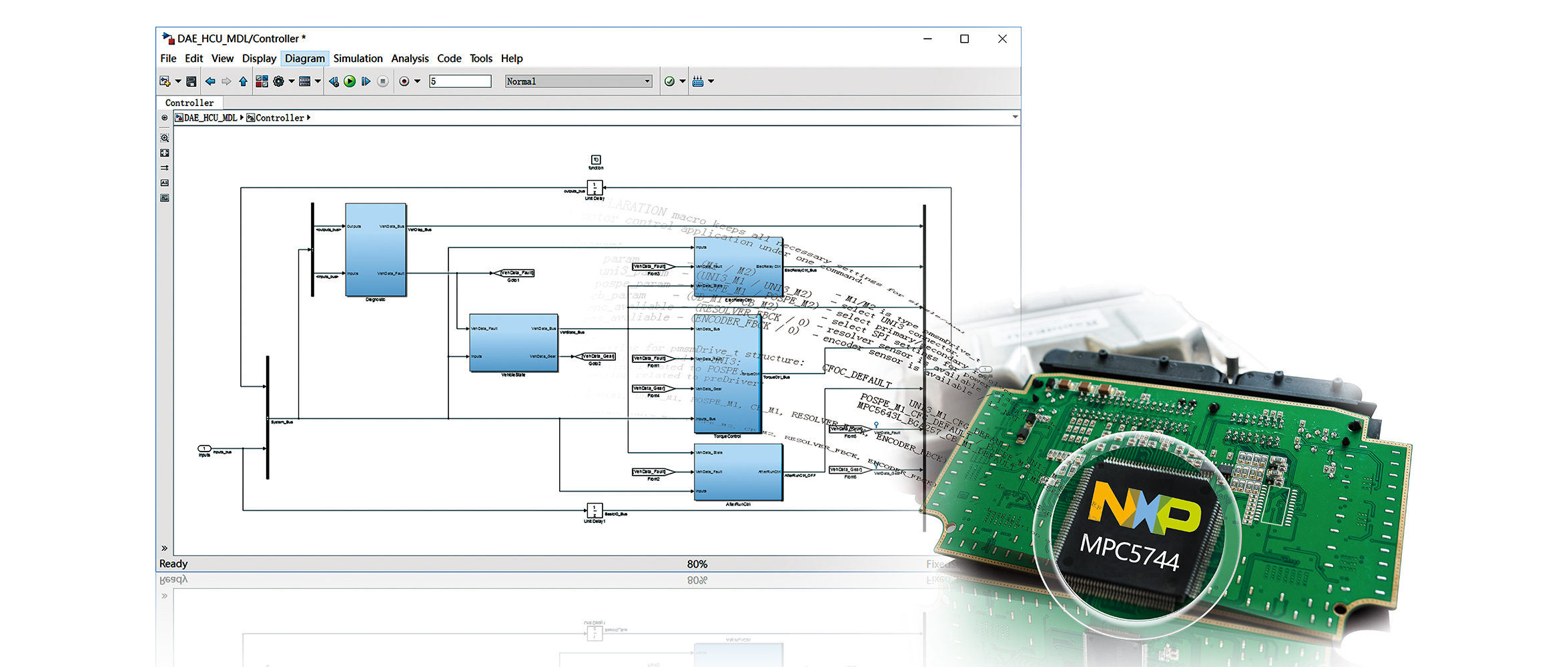
Ecucoder is a fully automatic code generation tool based on Simulink, which is used to configure ECU control algorithm model and basic software model, and generate product code automatically. Support Freescale HCS12 (MC9S12), hcs12x, mpc55xx, mpc56xx, mpc57xx and other mainstream chips of automotive electronic control system.
ECUCoder provides a powerful module library of basic software SIMULINK, which can configure basic software parameters conveniently and intuitively through friendly user interface, and generate basic software code automatically from Simulink model. Because the software can flexibly and deeply access and configure the basic software parameters, the basic software code generated by the model can support the two stages of controller rapid prototyping and product development.
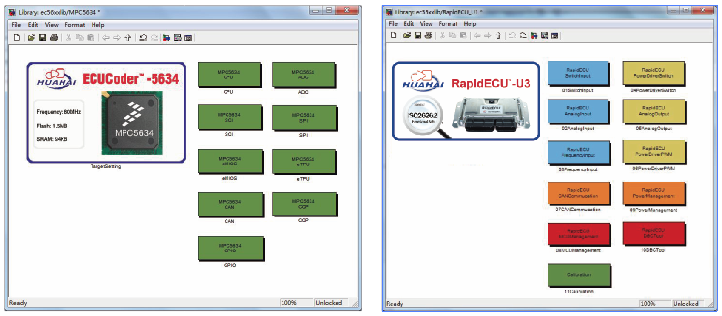
Chip level module library Controller level model library
※ High quality product level C code generation based on Based on Simulink coder ™
Simulink Coder™(formerly known as Real-TimeWorkshop) generates C code directly from the Matlab \Simulink \Stateflow graphical model. The generated code can be used for both real-time and non-real-time applications, including simulation acceleration, rapid prototyping, and hardware-in-the-loop testing, making it the industry's most widely used high-quality product-grade code generation tool. Ecoder is based entirely on Simulink Coder™ code generation technology, guaranteeing high quality and reliability of source code.
※ One click automatic code generation, while generating basic software and application software, without manual integration
The model needs to run on the real-time target hardware to achieve the goal of development and verification finally. The basic code often takes 2-3 months of integration and debugging to make the model run perfectly on the real-time target hardware.
One click automatic code generation can complete one click automatic code generation from model to hardware executable code, and generate basic software and application software at the same time, without any manual operation by users. The original time-consuming basic software development and months of integrated debugging work are all integrated into the ECUCoder automatic code generation tool, and the model to executable code generation process is completed It only takes 2-3 minutes, and all of them are completed automatically. The basic software and application software code are generated directly, and the compiler is automatically called to generate executable code in the background. It saves a lot of time and energy for users, enables users to focus more on the control model design, and keeps the model and code synchronized during the development process.
※ The source code is completely open
The C code architecture generated by the model is clear and completely open. Users can use it directly through transplantation or modification, and it can be used as a reference for independent development. The code readability and execution efficiency are well compromised. The completely open source code ensures that users can use the generated code more efficiently, and provides more open and free design space for product developers. The standard code of ecucoder refers to the design concept of AUTOSAR and supports the development of users based on AUTOSAR specification.
※ The powerful GUI interface can directly access and configure the whole basic software from Simulink
The basic software can be accessed and configured directly from Simulink through the GUI interface. The underlying program category covers a variety of vehicle level drivers and signal conditioning, power management, memory management, can, CCP, bootloader, diagnostic protocol stack, communication protocol stack, etc. The software configuration process is very convenient. Users can drag the module with the mouse and complete the simple parameter setting to realize the whole basic software configuration.
※ Asap2 standard calibration files can be generated at the same time, and can be easily compatible with third-party tools
Through the simple definition of calibration variables, asap2 standard description file (* A2L) can be directly generated. This function makes it easy for users to calibrate controller variables online, and make use of existing third-party tools for calibration and testing. It does not affect users' habits and improves the utilization rate of tools.
—— ECUCoder Supports the Following Processors
• NXP MPC55xx series
• NXP MPC 56xx series
• NXP MPC 57xx series
• NXP S12 / s12x series
• Infineon TC178x series
• Infineon TC275 series
• STMicroelectronics SPC56x series
• Texas Instruments TMS320F28069 series
• Provide customized services according to user needs
—— ECUCoder Currently Provides the Following Basic Software Modules
• Low level driver
• Calibration protocol
• Boot loader
• Real time operating system
• Communication protocol stack
• Diagnostic protocol stack
• It can provide customized services for other functional modules according to user needs
|