|
|
|
| Vehicle Physical Model Development |
—— Overview
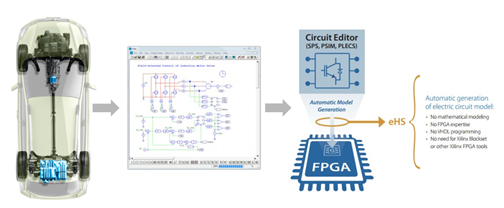
Provide vehicle physical model modeling services based on user tools, including Simulink, AMESIM and other modeling tools to build vehicle or component models (hybrid, pure electric, battery, motor, various types of gearboxes, hydraulic actuators, etc.) to support follow-up Controller integration test.
—— Characteristics of Physical Model
• The whole vehicle model runs in the real-time system, and the overall solution step is less than or equal to 1ms, which can meet the real-time requirements of hardware in the loop test system;
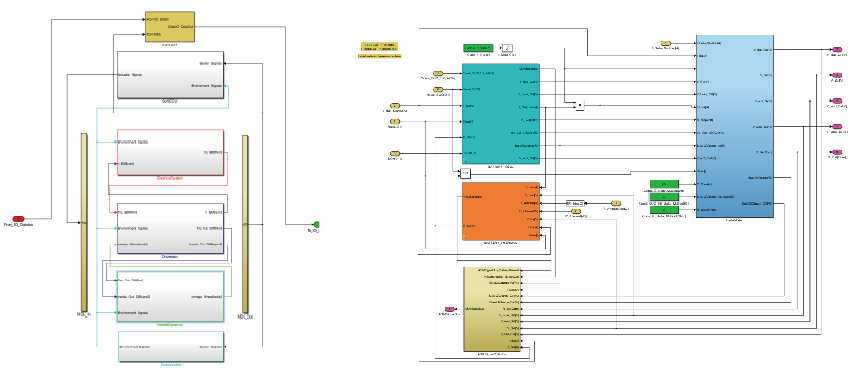
• The vehicle model is built based on MATLAB / Simulink and supports secondary development. Users can replace the standard module in the original model with user-defined module;
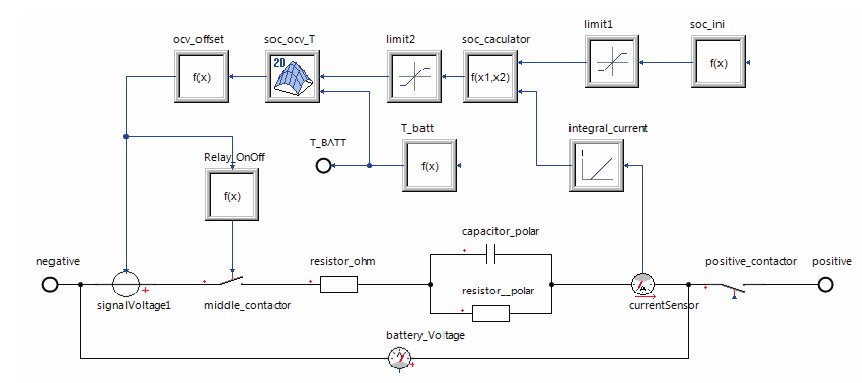
• The simulation model files are delivered in white box, and the physical modeling is used to display the bottom library module. The model does not contain any S-function encapsulation;
• The model is completely open source, all models can be edited, modified and set parameters, and users can configure parameters themselves.
—— Service Content
• Preliminary scheme matching, vehicle power and economy research;
• Physical model calibration, calibration bench and real vehicle test data;
• VCU / HCU / MCU / BMS controller mil / SIL / HIL integration test;
• Test condition reappearance, fault analysis and location;
• Support controller pre calibration.
 Motor simulation Kit
Motor simulation Kit
Battery model
Pure electric vehicle model Dynamics model
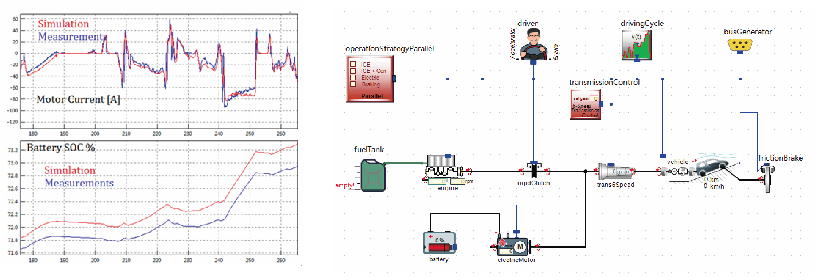 Simulation data Hybrid vehicle model
Simulation data Hybrid vehicle model
|