|
|
|
| Intelligent Driving Simulation Test Solution |
—— Overview
Intelligent driving covers traditional advanced driver assistance systems (ADAS) and fully automatic driving systems (SAE Level 3 and above). Before smart driving cars are truly commercialized, they need to undergo a lot of tests to meet commercial requirements. At present, about 90% of intelligent driving algorithm tests are completed through simulation platforms, 9% are completed at the test site, and 1% are completed through actual road tests. With the improvement of the level of simulation technology and the popularization of application, the industry aims to achieve 99.9% of the test volume through the simulation platform, 0.09% of the closed field test, and finally 0.01% to the actual road, which can make the research and development of intelligent driving vehicles achieve a more efficient and economic state.
—— Simulation Test System Composition
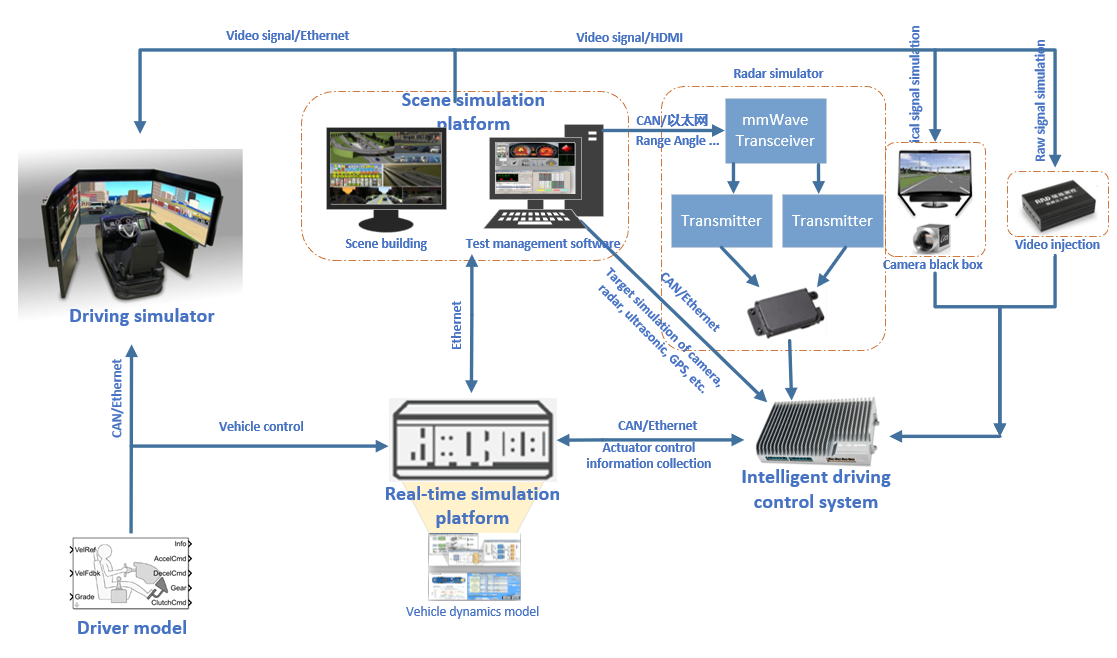
An intelligent driving system generally includes a system that integrates environmental perception, intelligent decision-making, and vehicle control. Therefore, the intelligent driving simulation test needs to include road traffic scene simulation, vehicle dynamics simulation and sensor simulation.
The framework of simulation test system is shown in the figure:
—— Application Fields
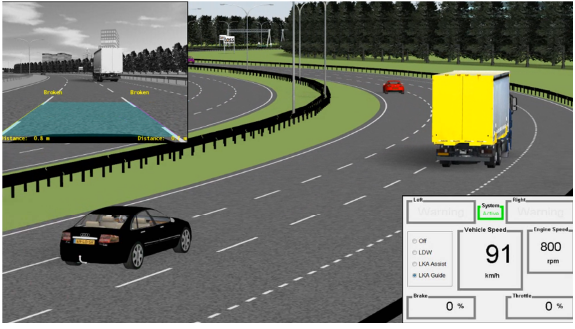
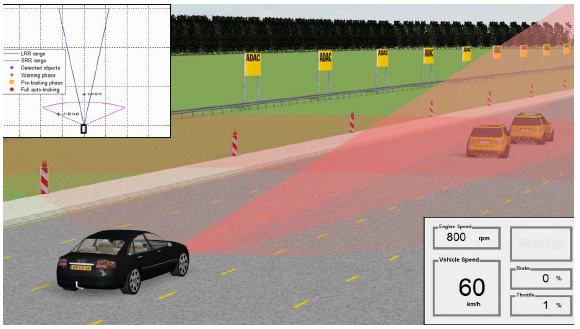
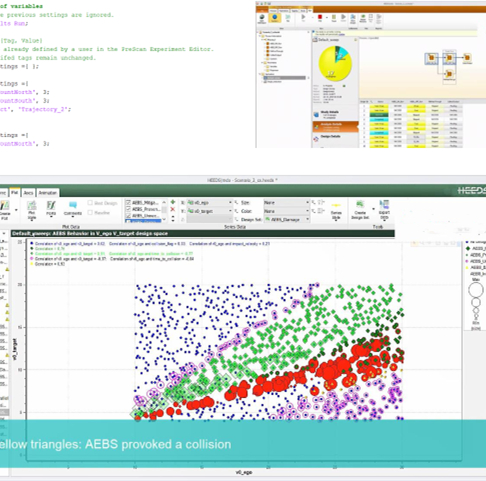
• ADAS controller control algorithm development and test verification: LDW, LKA, ACC, AEB, FCW, BSD, LCA, etc.
• Development and verification of autonomous driving decision and control
• Integrated driving simulator or cockpit for driver-in-the-loop testing
• Millimeter wave radar controller function and performance test
• Vehicle in the loop test
• Measurement and calibration
—— System Features
♦ Road Simulation
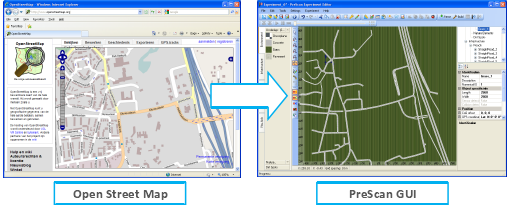
• The road model is built by GUI and road model library
• Support OSM-Open Street Map map data import
• Support OpenDRIVE high-precision map data import
• Support complex road network structure: three-way intersections, crossroads, overpasses, etc.
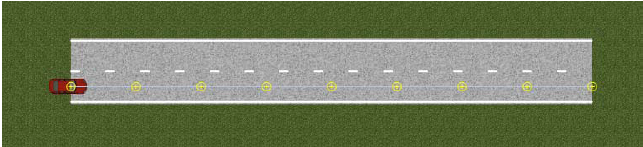
♦ Traffic Simulation
• Build road users such as motor vehicles, pedestrians, and animals through GUI graphical interface library and model library
• Built-in scene demo: NHTSA, ISO, ADAC, etc.
• The behavior of each road user can be customized, including path planning, speed control, loops, etc., and support time trigger mode
• Can generate random traffic flow in compliance with traffic rules
• Support importing OpenSCENARIO scene data
• Support importing KITTI scene data
• GIDAS-CIDAS German/China traffic accident data
• Configurable external vehicle dynamics
• Configurable external driver
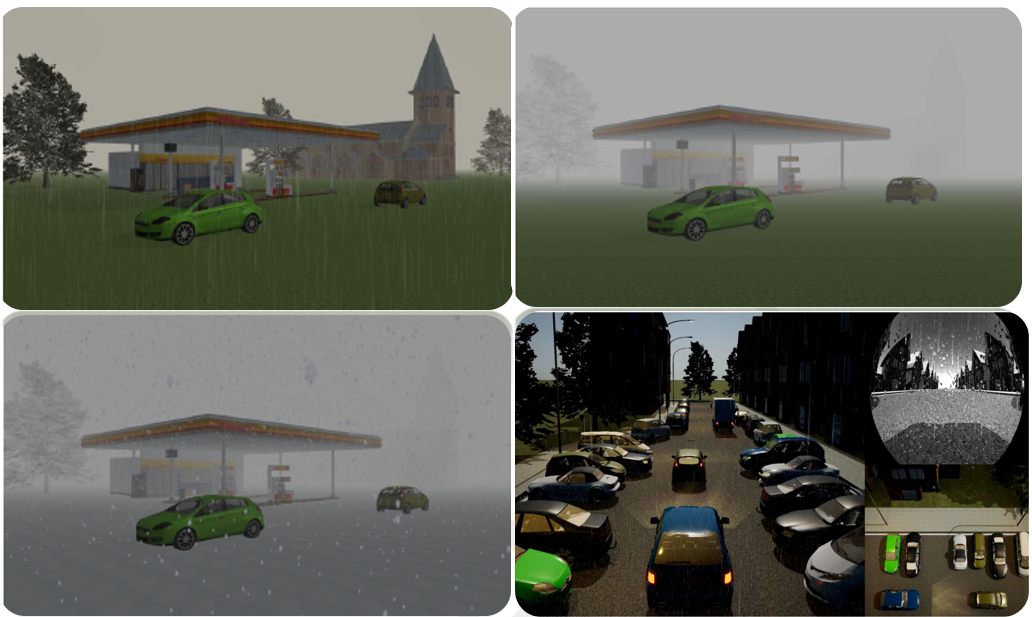
♦ Environment Simulation
• Environment environment model can simulate weather such as sunny, rain, snow, cloudy
• Weather & Lights can simulate light conditions such as day and night
♦ Environmental Awareness
• Abundant sensor models, supporting physical signal simulation, original signal simulation and sensor target simulation
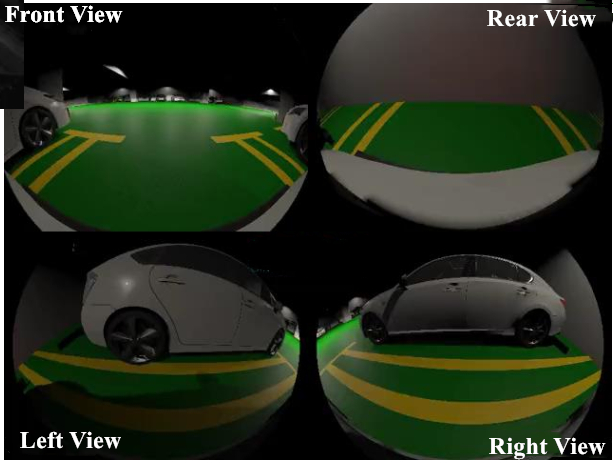
• Camera sensor model: standard camera, monocular camera, multi-eye camera, fisheye camera
※ Support output image frame information (including internal and external parameters, light loss/blur/distortion/HDR and other imaging effects) Provide video black box or video injection two HIL simulation methods
※ Can directly output the position information of the target object within the FOV
※ The physical model of the camera: based on the imaging principle of the camera: lens/photosensitive device/AD conversion...; output multi-spectral, high dynamic range camera model
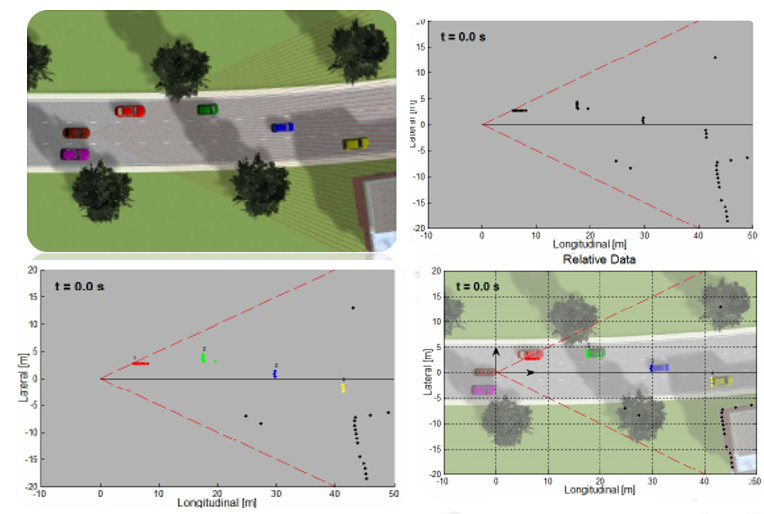
• Radar sensor model
※ Ideal target level model: output the ideal position, speed and angle information of the target in the radar field of view
※ Target level model: output position, speed, and angle information including accuracy and resolution characteristics of the target object
※ Target level radar model with energy output: including RCS/reflection angle/energy loss/transmission attenuation/antenna gain map
※ Radar performance defect model: including detection noise/false detection/missing detection/target hashing/detection delay...model
※ Radar physical model: MIMO/modulation and demodulation/multipoint reflection/multipath reflection......
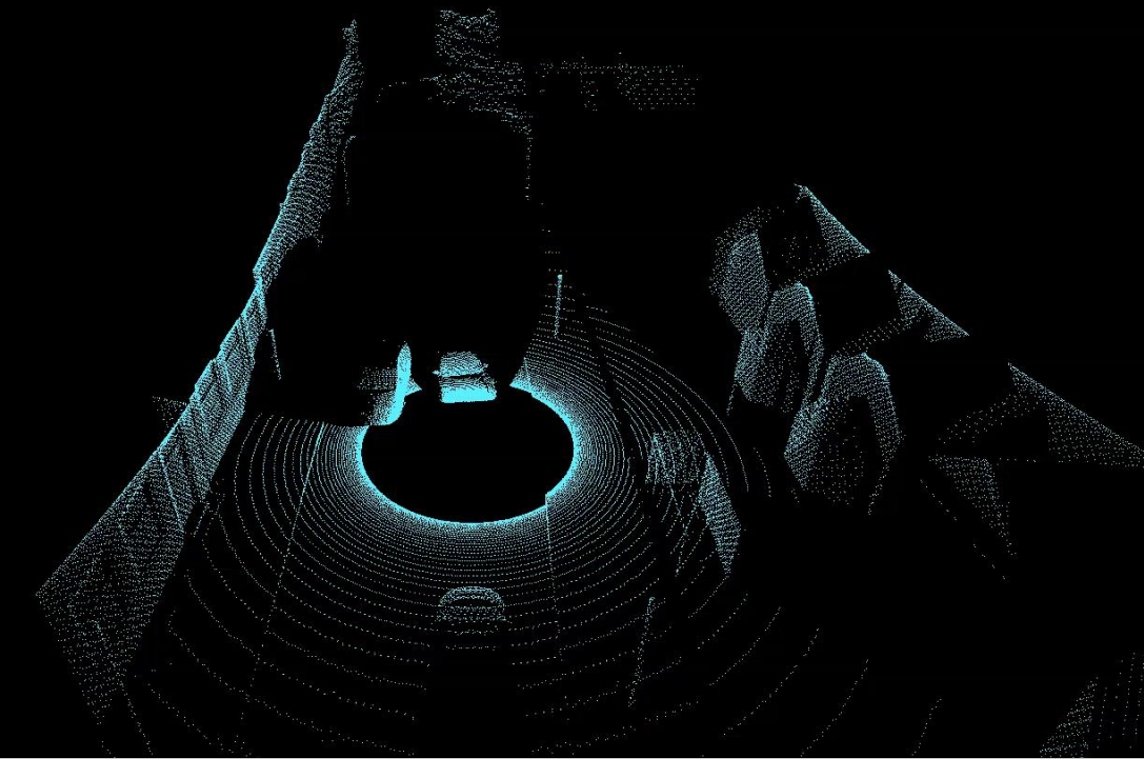
• Lidar model: support output point cloud data
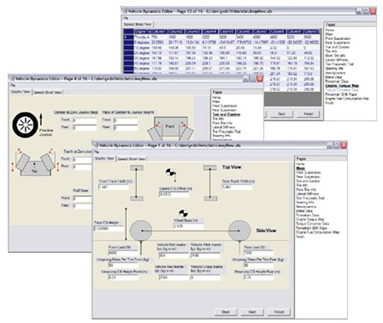
♦ Vehicle Dynamics Model
• Power system: support pure electric drive system, hybrid power system and engine power system model
• Chassis system: braking system, tire system, steering system, suspension system and multi-body dynamics model
♦ Engineering Service
• HIL system integration, configuration, debugging and testing
• Model customization development and testing services
※ Road model building;
※ Build test scenarios;
※ Vehicle model construction and parameterization
※ Sensor model configuration
※ Test requirement analysis and test solution development
※ Test case development
|